1. Etcd冷启动
1.1 初始化主流程
Etcd的启动类为 父目录的main.go文件。其启动过程调用如下:
1 | main.go |
startEtcd中执行etcd启动的主要过程:
1 | embed.startEtcd(inCfg *Config) |
通过 cfg.PeerURLsMapAndToken(“etcd”) 逻辑,了解到etcd有三种方式来获取集群中其他节点信息:
1 | switch { |
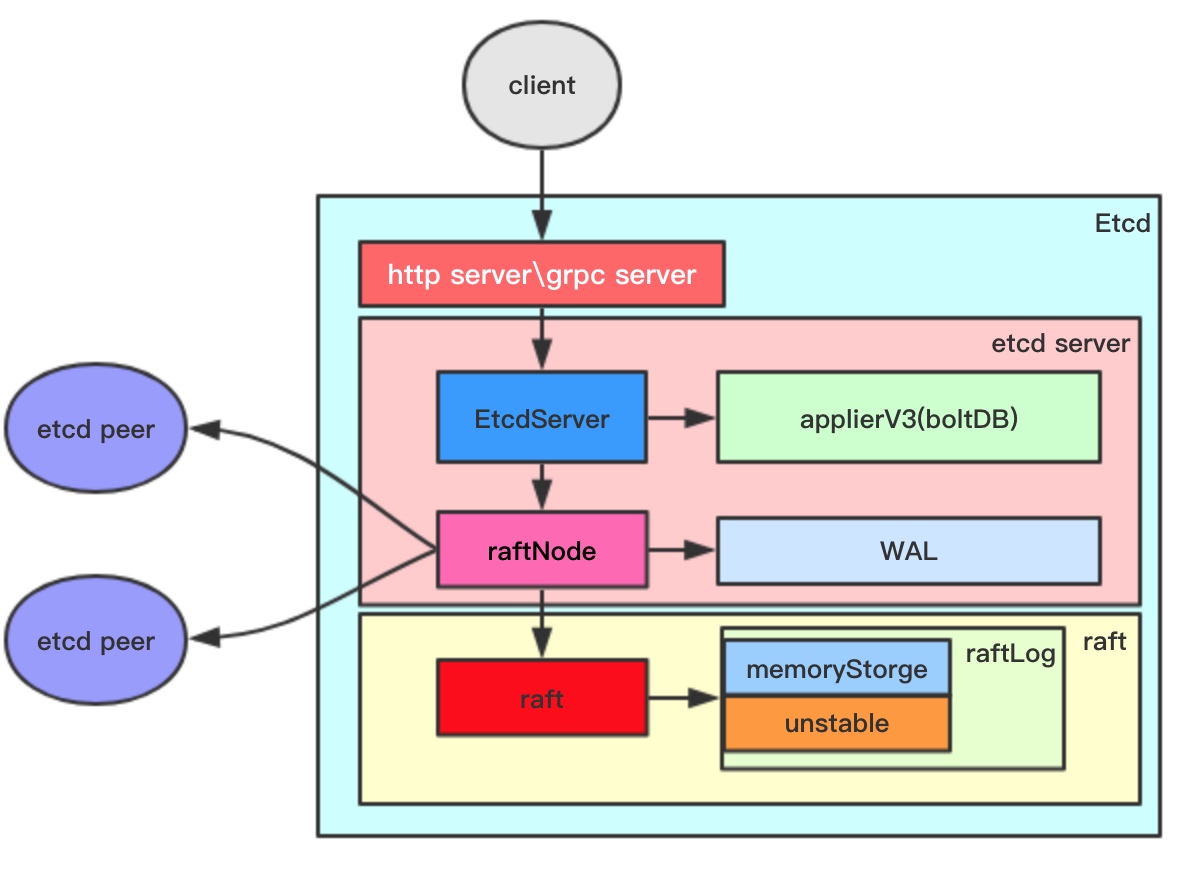
准备好创建etcd节点后开始初始化节点信息:
1 | etcdserver/NewServer(srvcfg) |